Eureka Move!
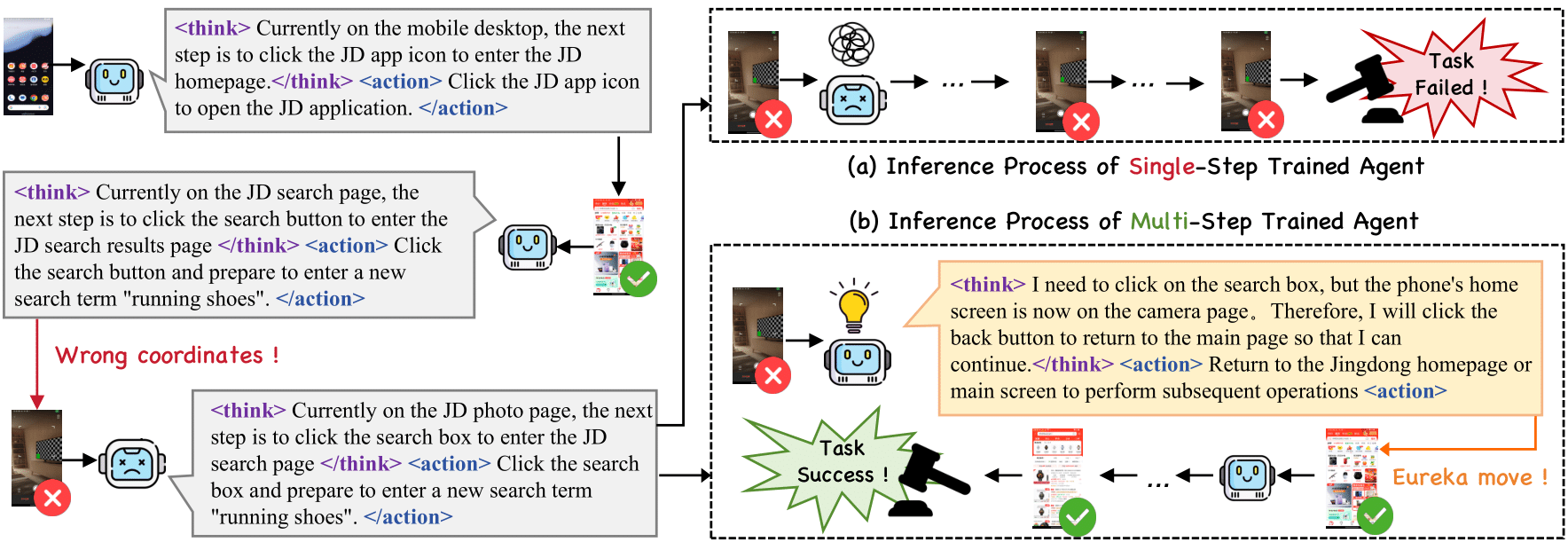
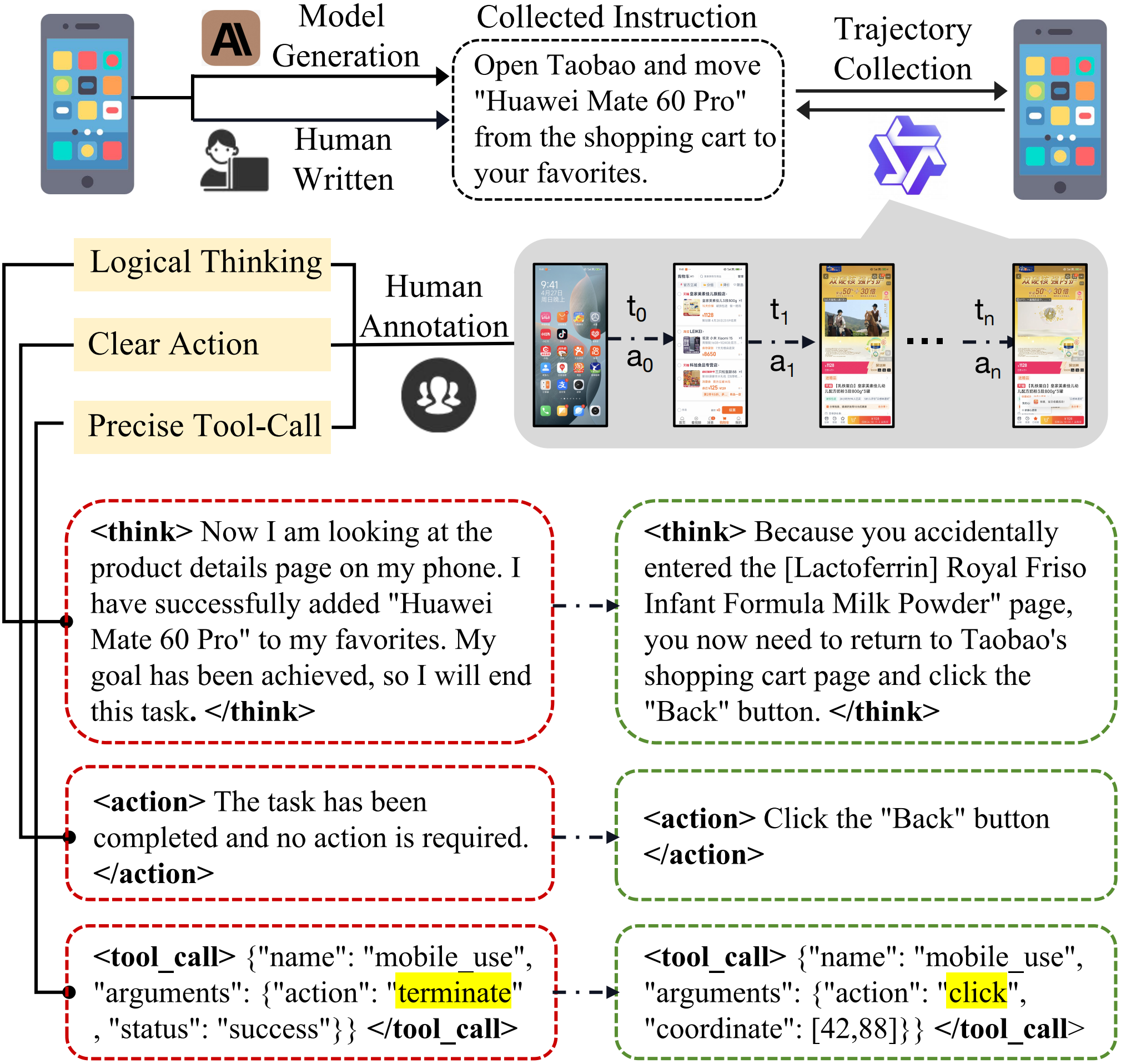
Our agent is capable of correcting itself from an incorrect state back to the correct action (called the eureka move)!
Our agent is capable of correcting itself from an incorrect state back to the correct action (called the eureka move)!
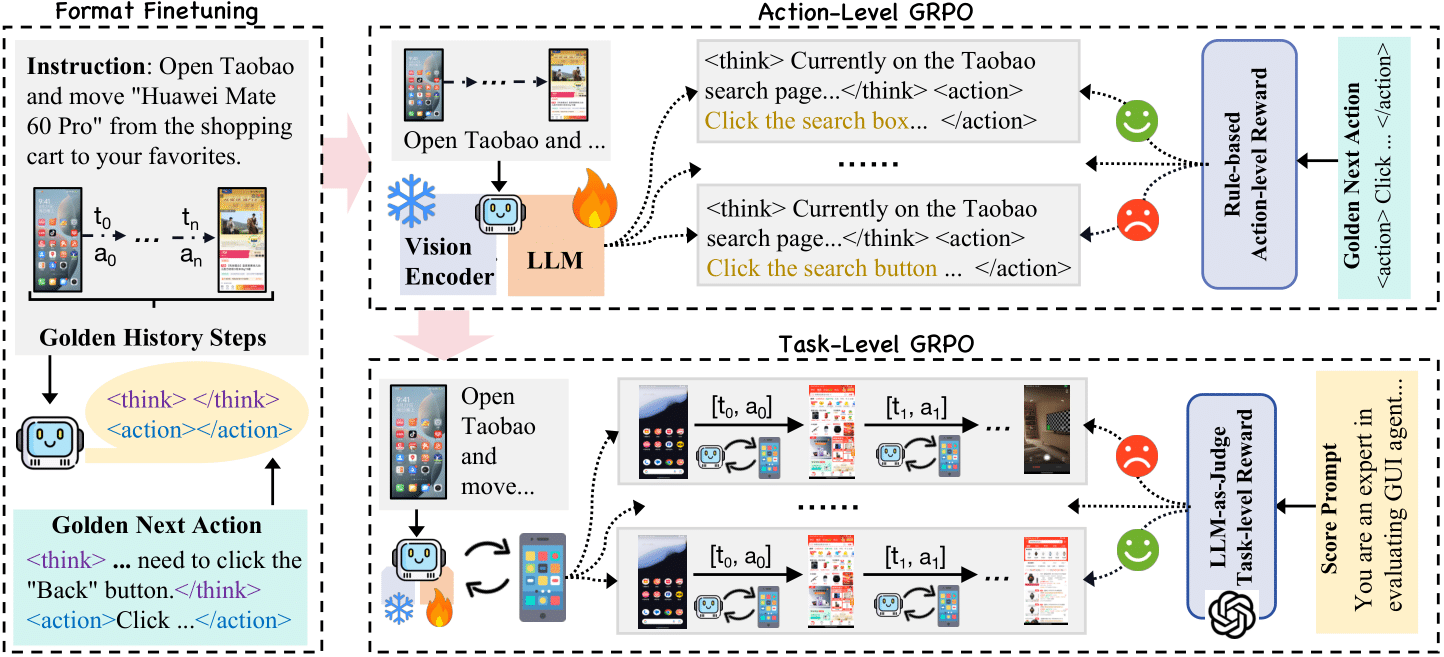
Our training framework consists of three stages:
Initial format fine-tuning using our dataset.
Single-step GRPO training with action-level rewards to enhance the format compliance and click accuracy.
On-line training with task-level rewards based on multi-turn trajectories to improve the generalization ability.
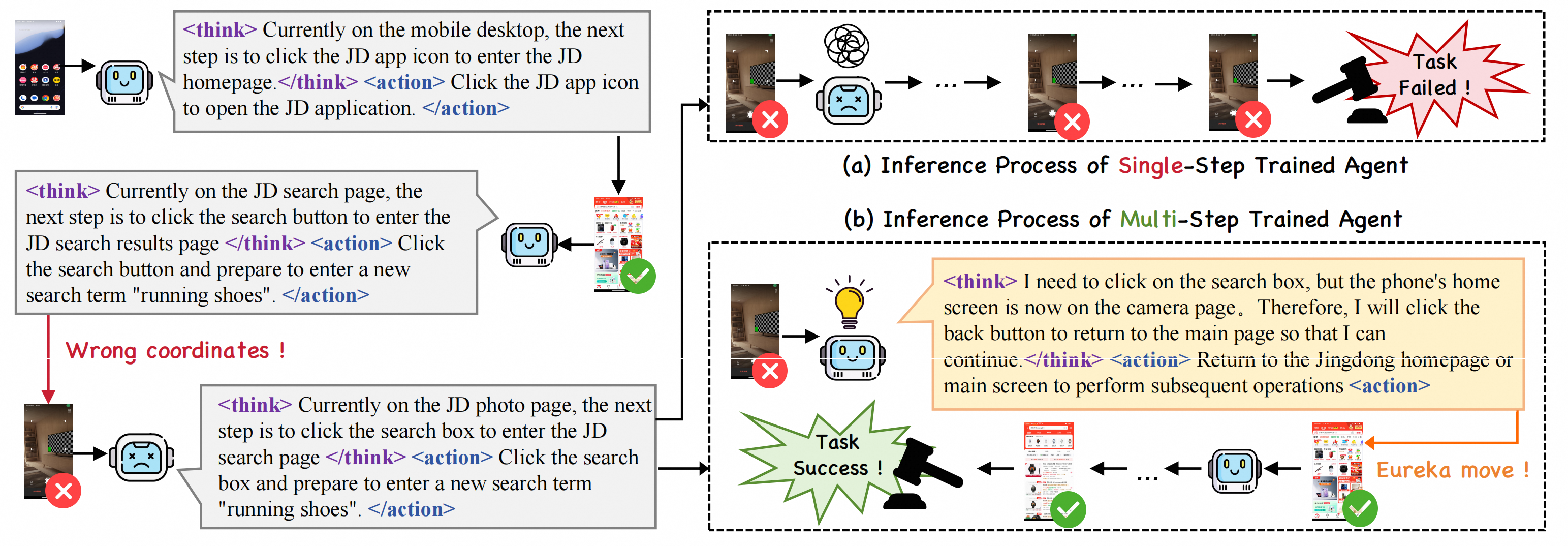
Figure (a) illustrates an action-induced agent that is encouraged to “think longer” before selecting a single-step action. In contrast, Figure (b) depicts an agent trained at the task-level rewards, which explores and adjusts its trajectory over multi-turn interactions with the environment.
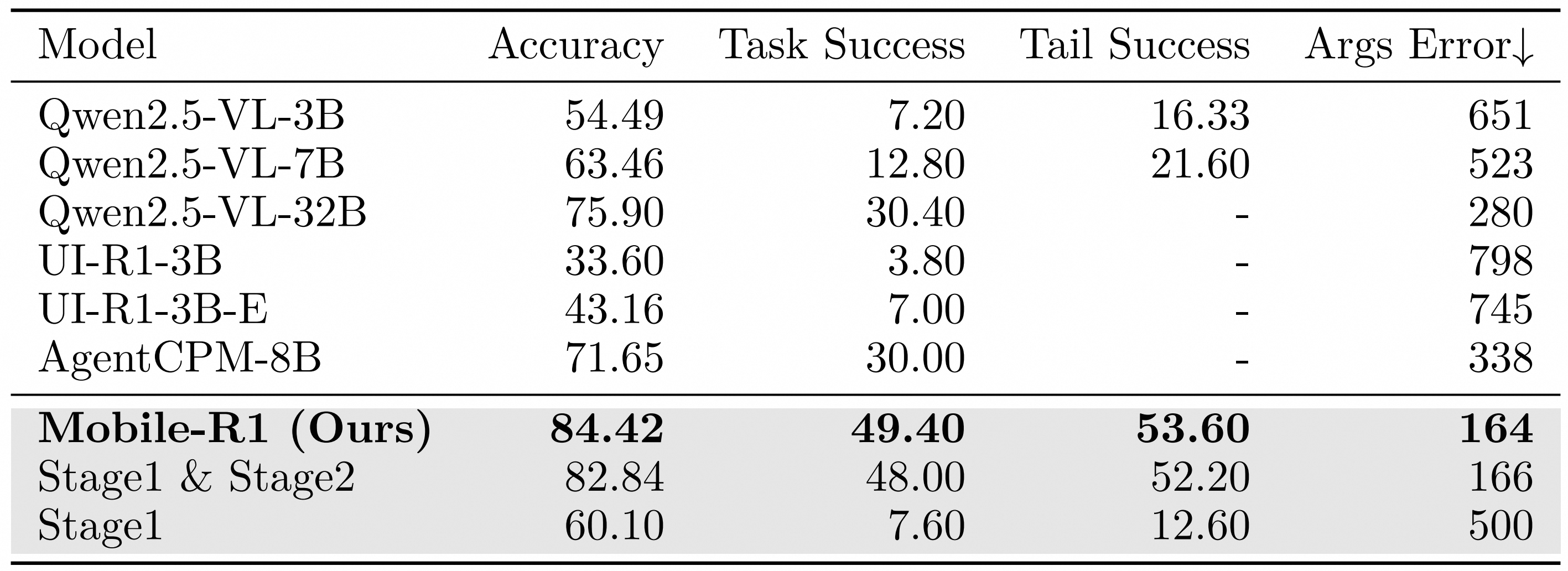
Static evaluation results of Mobile-R1.
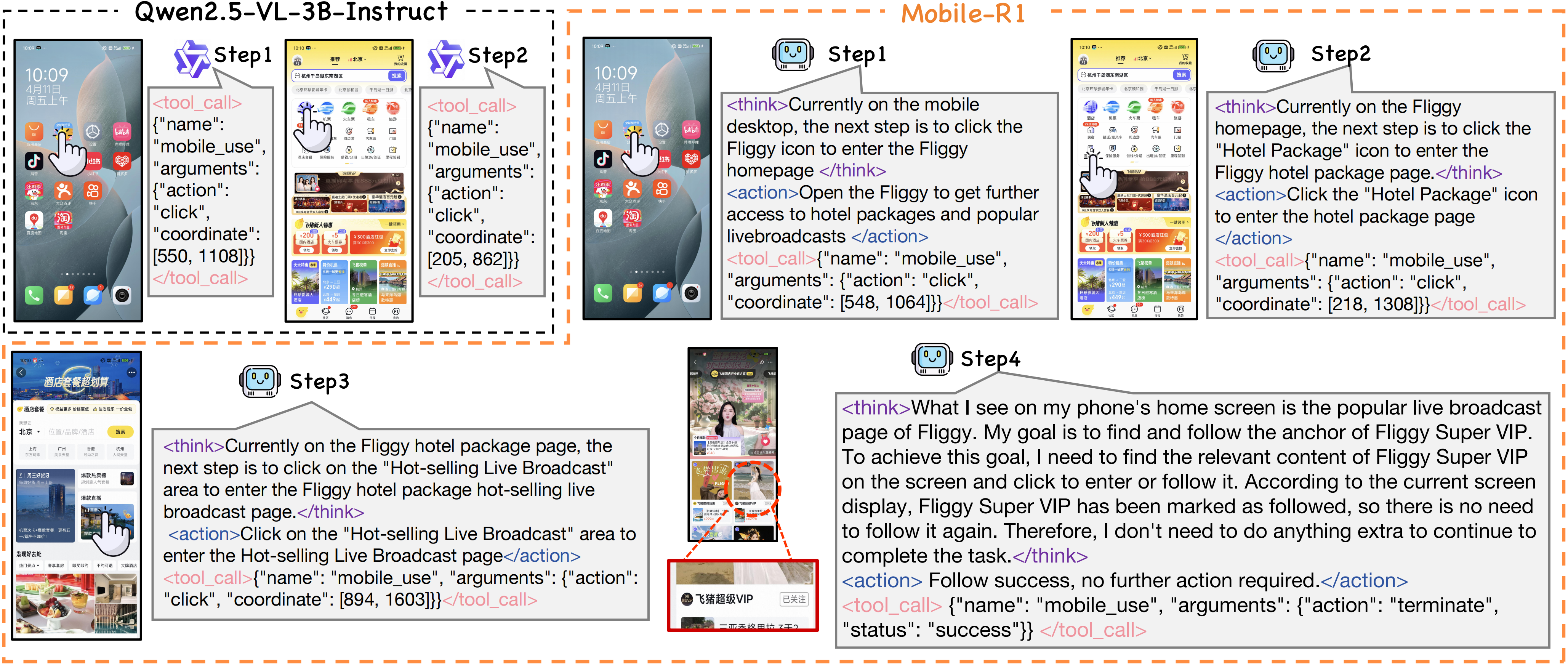
Comparison of Mobile-R1 and Qwen2.5-VL-3B-Instruct
Task: "Open Fliggy, enter the hotel package, enter the popular live broadcast, find Fliggy Super VIP, and follow the anchor"
Static evaluation results of Mobile-R1.

Distribution of trajectory length.